Join us and unlock access to personalized features, exclusive content, and more. Fill in the details below to get started.
You asked we answered!
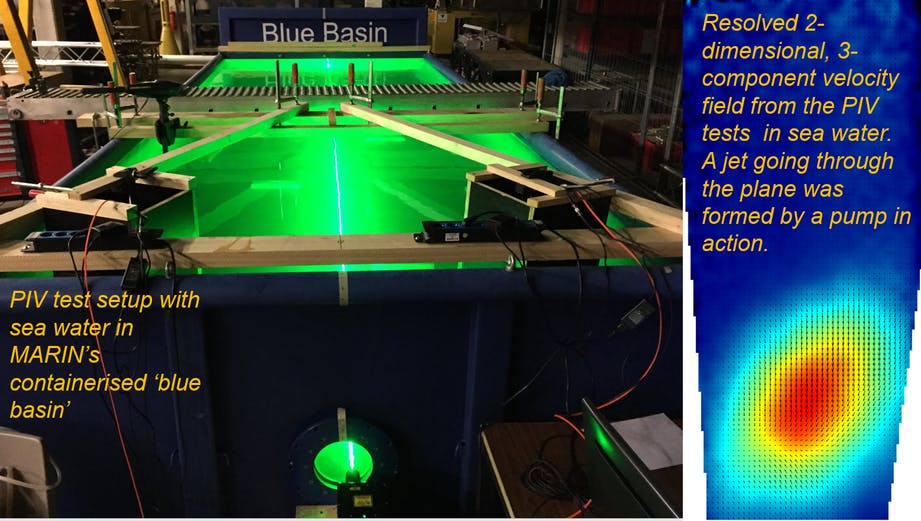
We received an interesting question on how sensitive would be the developing PIV system to ship vibration usually present at the aft end?
We are happy to answer that this has been our main reason to move from LDV to PIV. The challenge with LDV was to get the two laser beams to intersect. That requires very high mechanical stability of the device when putting in a vibrating environment. A PIV system is inherently more stable, as there’s no need to intersect laser beams at meters distance.
There are still three ways vibrations could impair a PIV system’s functioning and accuracy, ordered in severance:
1 - The equipment brakes down due to vibrations
The camera and laser move independently
2 - The whole system moves, and the measurement is taken on a slightly different location.
3 - For no. 1, we know the laser itself is robust to vibrations, as are the sCMOS camera’s, so that eliminates concerns on their functioning in these conditions.
Regarding no. 2, the previous tests with PIV on a ship have shown that ship vibration posed no issues. This is also due to the ship’s vibrations being in an order of magnitude lower frequency range than the speed of the double-pulse rate of image acquisition by the PIV cameras. Another step we’re taking is that we aim to integrate the cameras and laser in one rigid device. This way, the laser and camera cannot move independently from each other, eliminating that effect of the ship’s vibrations.
What we’re left with in no. 3 is that when the system as a whole vibrates, the measurement plane itself can move slightly from recording to recording. We do not expect this effect to propagate significantly into the measurement uncertainty, given the previous experience and considering that in the end, we’re using (phase-) averaged results.
Other News
How do you know that your Energy Savin
If you perform sea trials on a vessel and, after that, you put her in a dry dock to install an Energ...
See more
What did we learn about sea trials pro
We all know that a vessels actual sea trials measurements are affected by many external factors, suc...
See more

New CFD Workshop on the JoRes2 twin sc
All the previous ship scale validation cases considered under the JoRes project were either single s...
See more